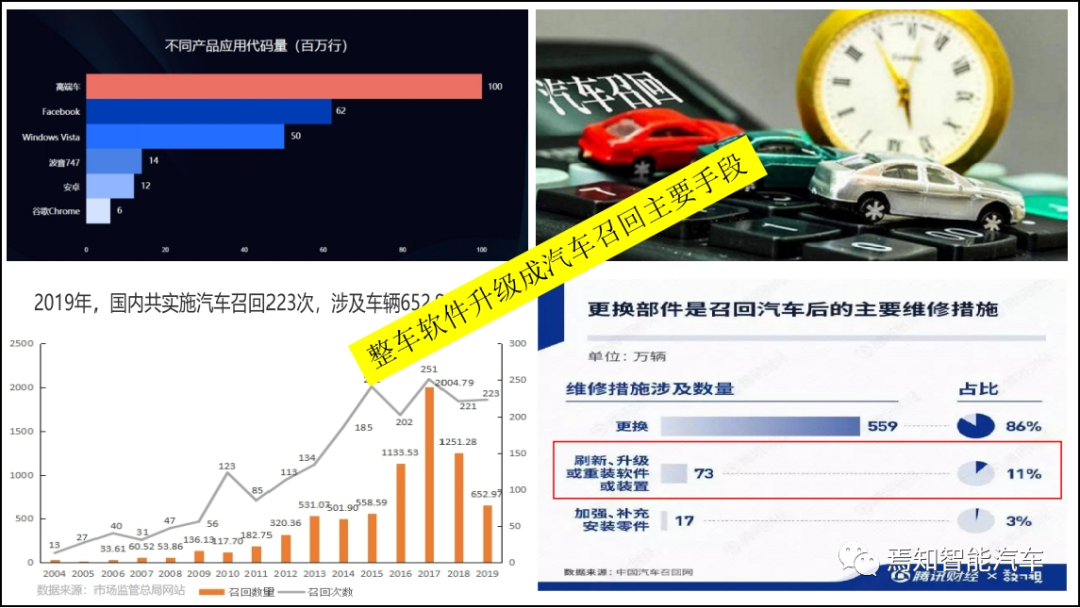
本文章将针对自动驾驶汽车的软件升级现状需求及监管要求等进行详细的描述。意在帮助读者整体了解自动驾驶中的软件升级过程原理、准入要求及其应对策略。
自动驾驶系统感知算法应用中,基于BEV的图像感知算法是应用得十分广泛的。特别是基于传感器融合的BEV算法可以很好的解决整个感知定位过程中的环境整体探测能力,更能生成如伪高精地图用于进行形式态势评估。特...
单目的测距和3-D估计靠什么?是检测目标的Bounding Box(BB),如果无法检测的障碍物,该系统就无法估计其距离和3-D姿态/朝向。没有深度学习的时候,ME主要是基于BB,摄像头标定得到的姿态...
智能驾驶背景下转向系统发展趋势
早在1984年,美国卡梅隆大学就启动了自动驾驶ALV项目。自此,人工智能技术开始在自动驾驶领域试水应用,同时,逐渐形成了自动驾驶最基本的控制策略。
SAE针对J3016发布了一份新的驾驶自动化等级的标准可视化图表,对六个级别的驾驶自动化等级,用简明易懂的语言进行了描述和定义。
2021年8月20日,由工业和信息化部提出、全国汽车标准化技术委员会归口的GB/T 40429-2021《汽车驾驶自动化分级》推荐性国家标准由国家市场监督管理总局、国家标准化管理委员会批准发布(国家标...
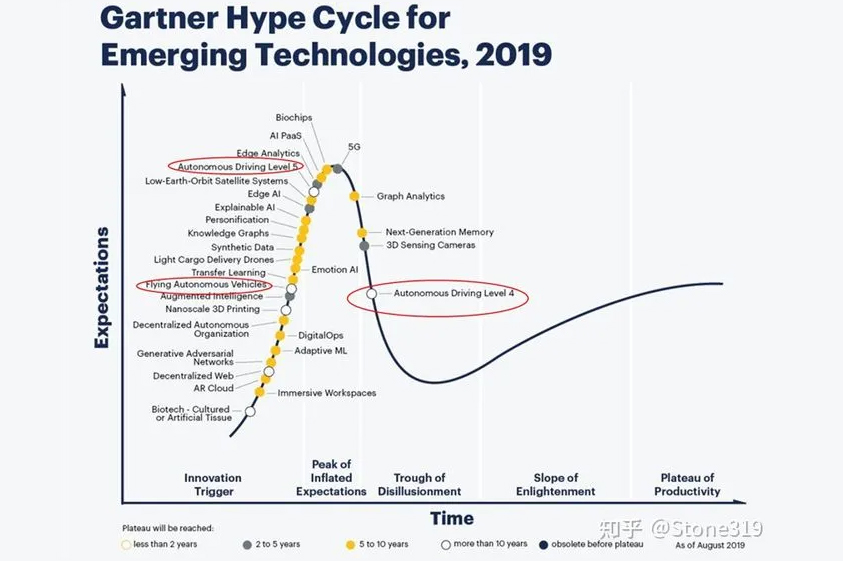
近年来,自动驾驶技术技术的发展速度非常快。预计达到完全自动驾驶L5的程度是指日可待的。
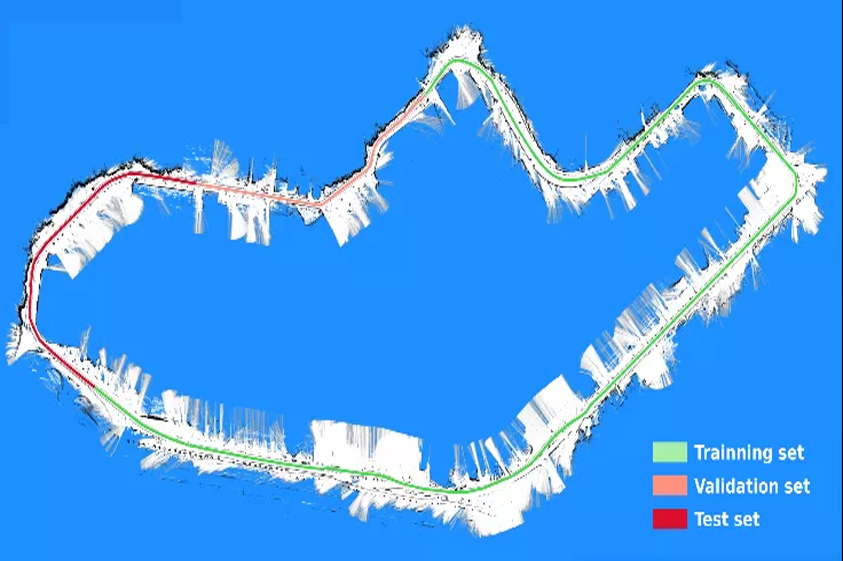
占用栅格地图是无人驾驶汽车的定位和规划模块所需的重要输入。深度神经网络亦是近年来智能驾驶研究的一大热点。所推荐的这篇文章借助深度神经网络生成满足无人驾驶汽车需求的占用栅格地图,并提供丰富的视频材料证明...
已完成
数据加载中