

-
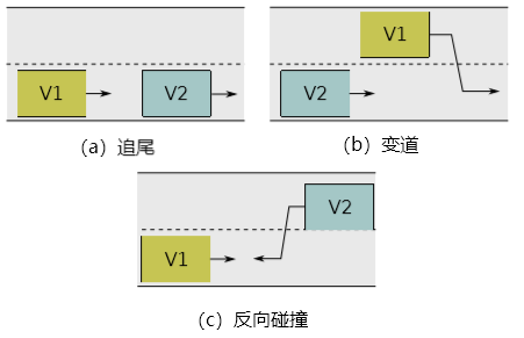 自动驾驶系统中入侵检测的特征选择
自动驾驶系统中入侵检测的特征选择随着自动驾驶技术的不断发展,提高汽车安全性的一个新趋势是车辆对车辆(V2V)安全应用。这些应用使用从车辆传感器和周围车辆收集的信息来检测和防止即将发生的碰撞。车辆配备外部通信接口使这些应用程序成为可能...
2020年04月21日03243 -
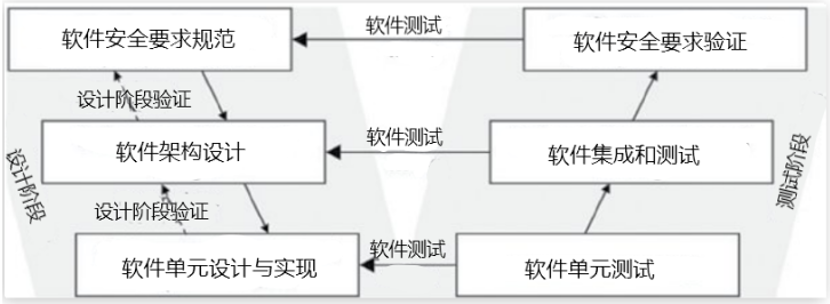 对26262的分析:汽车软件中机器学习及安全
对26262的分析:汽车软件中机器学习及安全机器学习在自动驾驶中扮演着越来越重要的角色,然而,它是否足够安全仍然存在争议。ISO 26262道路车辆功能安全标准为确保安全提供了一套全面的要求,但没有解决基于机器学习软件的独特特性。在这篇文章中,...
2020年04月21日02842 -
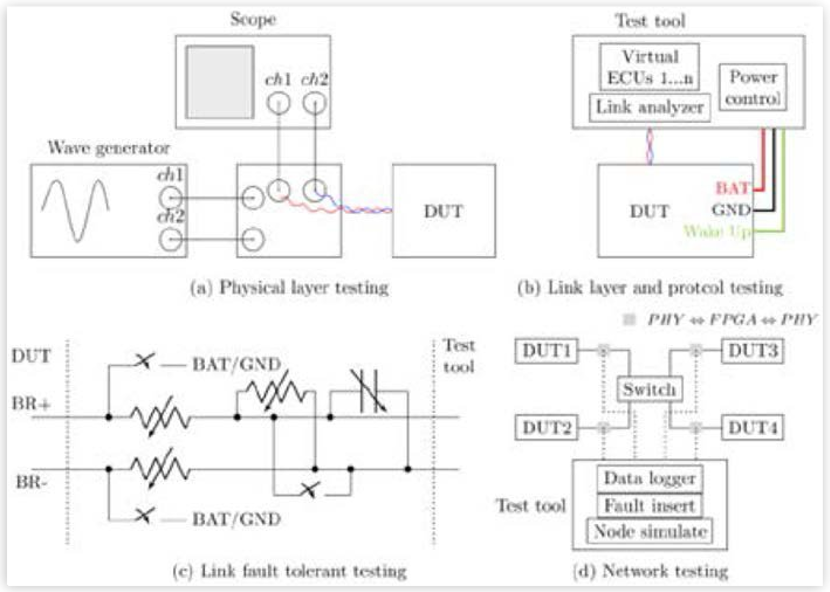 汽车以太网容错能力测试
汽车以太网容错能力测试随着汽车以太网标准BroadR-Reach和时间敏感网络(TSN)的引入,以太网已经成为车载网络的一种选择。虽然它已经在IT领域使用了几十年,但它是一种新的自动驾驶技术,需要广泛的测试。当前的测试解决...
2020年04月20日03453 -
 SOTIF概论
SOTIF概论安全是自动驾驶汽车开发中最复杂的要求之一,被列为接受和采用自动驾驶汽车的首要考虑因素。最近发生的涉及自动驾驶汽车的致命事故清楚地表明,安全对自动车辆的接受、测试、验证和部署至关重要。在传统的汽车系统中...
2020年04月20日03426 -
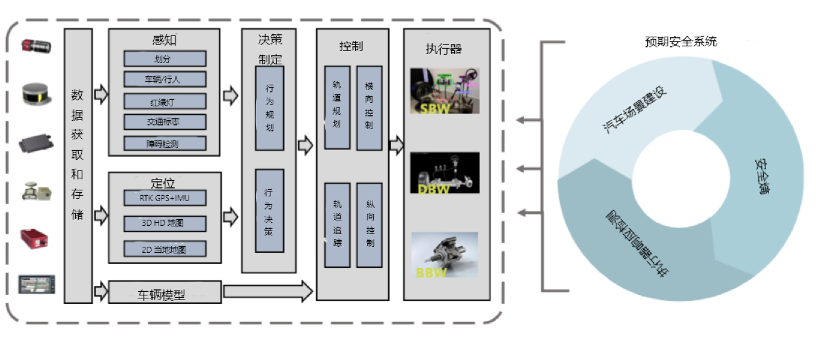 智能驾驶中预期安全系统的架构
智能驾驶中预期安全系统的架构智能驾驶作为未来的发展方向,其关键技术的研究取得了重大进展。然而,由于最近无人驾驶的事故,智能驾驶安全性受到了关注。针对这一安全问题,本文提出了一种智能驾驶安全系统。该系统为智能汽车感知、决策和控制模...
2020年04月20日02921 -
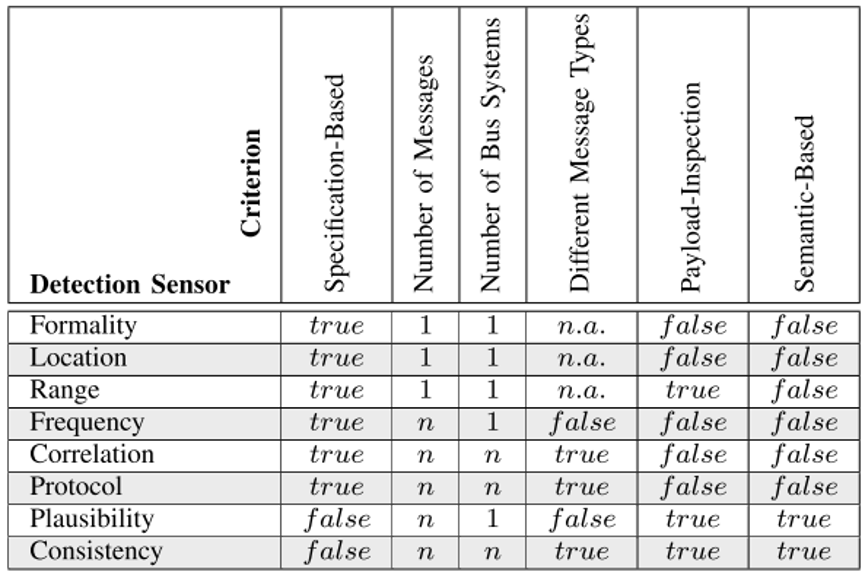 车载网络异常检测的结构化方法
车载网络异常检测的结构化方法车载网络具有通信系统的非常严格的规范,包括总线系统上允许的每条消息。 对于CAN,这些规范包含在特定网络的CAN矩阵中。 因此,标准AC-1描述了是否只能借助像CAN矩阵这样的规范才能可靠地确定传感器...
2020年04月07日02714 -
 基于时间序列特征提取的车载网络系统入侵检测技术
基于时间序列特征提取的车载网络系统入侵检测技术随着对物联网(IoT)需求的增长,通过网络提供并控制了诸如电力,天然气,水,铁路,飞机,汽车等各种服务。迫切需要在负责汽车控制的车载网络中升级非法入侵检测技术。已知有许多针对未经授权的入侵攻击的报告方...
2020年04月07日02346 -
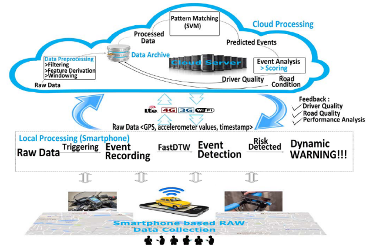 一种基于FastDTW和云计算的驾驶模式和道路异常的检测系统
一种基于FastDTW和云计算的驾驶模式和道路异常的检测系统驾驶方式分析和道路异常检测对道路安全产生重大影响。它们直接影响道路事故,并且已经成为解决道路安全问题的重要研究领域。本文提出了一种系统,该系统使用GPS和智能手机的加速度计来对驾驶员的驾驶方式进行分类...
2020年04月07日02284 -
 基于决策树的机器车拒绝服务和命令注入攻击检测
基于决策树的机器车拒绝服务和命令注入攻击检测移动网络物理系统,例如汽车,无人机和机器人车辆正逐渐成为网络攻击的有吸引力的目标。这是一个挑战,因为为常规计算机系统构建的入侵检测系统往往不合适。他们可能对资源受限的网络物理系统要求太高,或者由于缺乏...
2020年04月07日02213 -
 新形车载网络IDS模型GIDS提高车辆安全功能
新形车载网络IDS模型GIDS提高车辆安全功能车辆中的控制器局域网(CAN)总线是一种高效的标准总线,支持所有电子控制单元(ECU)之间的通信。 但是,由于缺乏安全功能,CAN总线不足以保护自身。为了有效地检测可疑网络连接,需要入侵检测系统(ID...
2020年04月07日02676