本文对“软件定义汽车”这一概念进行了全面概述。
随着ChatGPT的火爆,大模型受到的关注度越来越高,大模型展现出的能力令人惊叹。
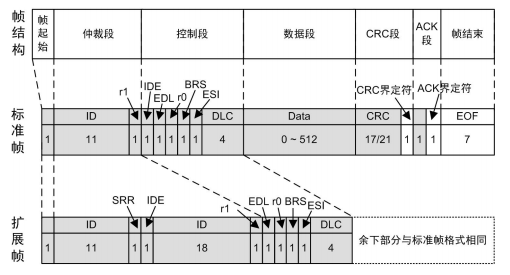
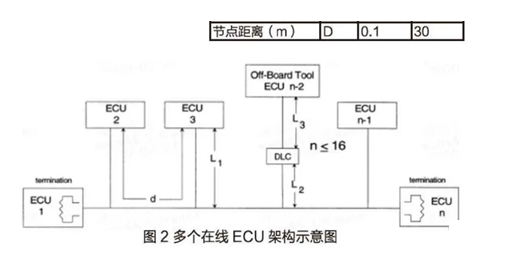
我们知道CANFD比CAN拥有更长的数据长度(最长64字节),更高的波特率(8Mbps甚至更高)。那么波特率更高,数据更长的CANFD,一秒钟最高可以发送多少帧CANFD报文呢?
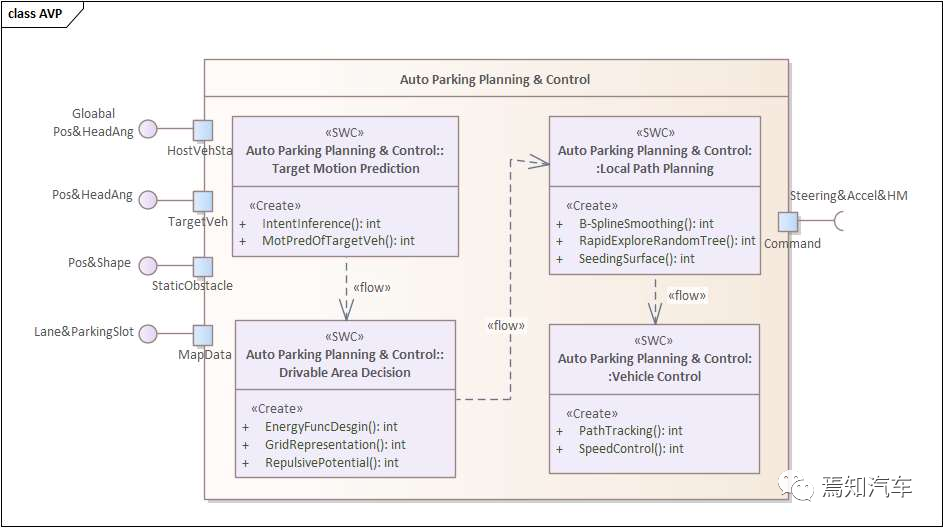
自动泊车过程中,运动预测至关重要,因为它决定了规划模块的安全约束,从而决定了运动规划的可行性和平滑性。
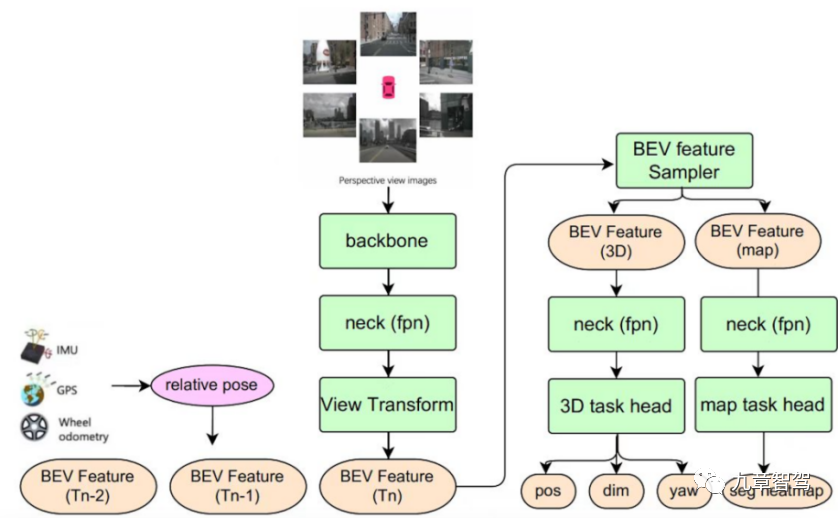
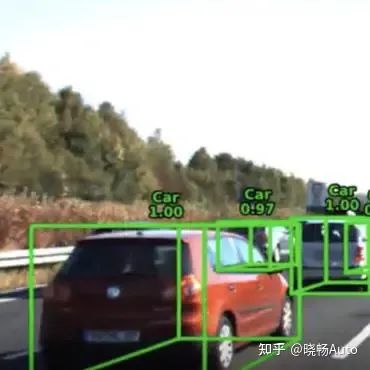
从车道保持到高阶自动驾驶功能,都需要车辆所处的静态、动态环境的准确信息。通过传感器数据融合,可以获得有关其他交通参与者的动态信息、静态环境以及道路和交通规则的信息。俗话说“单丝不成线,独木不成林”。面...
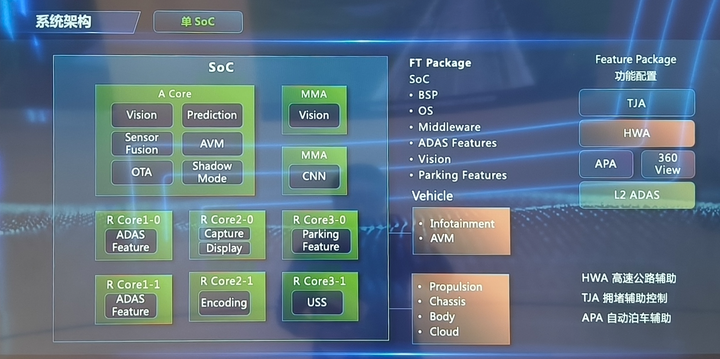
在汽车领域,分析或者介绍一个控制器,一般都从其最顶层需求(功能)入手。对自动驾驶域控而言,它的顶层需求是“实现一定的辅助驾驶功能”,一切都是为这个目标服务的。受制于成本,不同的域控能实现的功能自然是不...
电动汽车各个模块之间的交互有效性直接影响了汽车的行驶效率和驾驶感。而插电式混合动力汽车根据电力驱动系统和发动机动力系统的布局形式可以分为3类:串联式、并联式、串-并联混合式。该文探讨的是并联式混合动力...
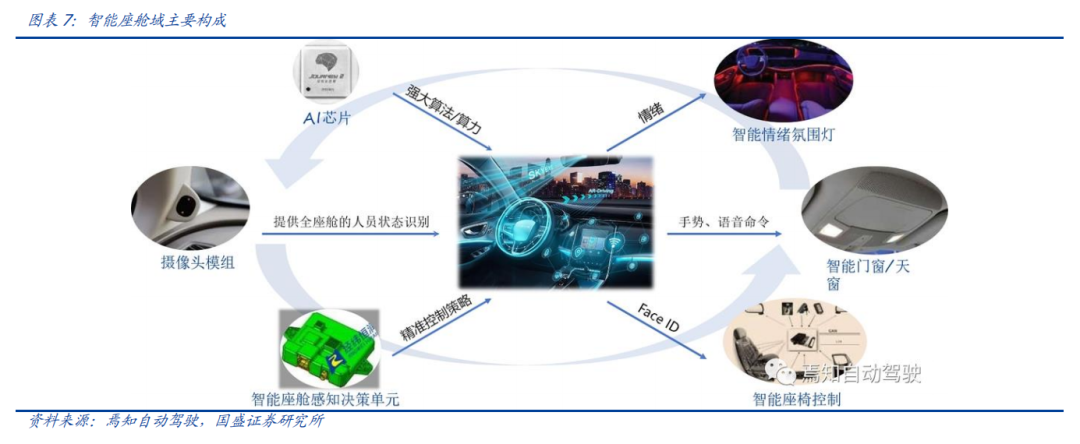
随着汽车智能化,网联化的渗透与普及,汽车电子电气零部件占汽车的比重也逐渐提高。高级驾驶辅助系统,车载多媒体娱乐系统等逐渐成为消费者关注且左右购买决策的功能配置。
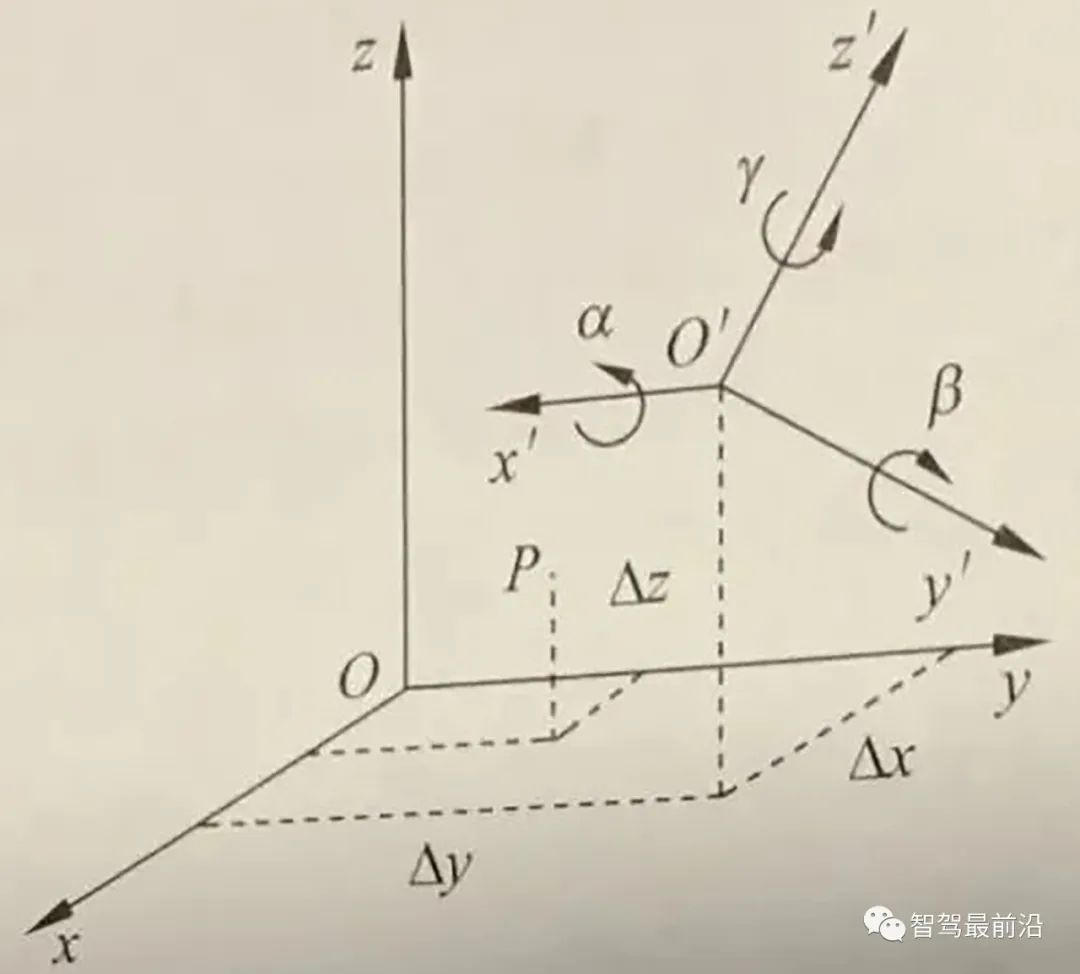
标定传感器是自动驾驶感知系统中的必要环节,是后续传感器融合的必要步骤和先决条件,其目的是将两个或者多个传感器变换到统一的时空坐标系,使得传感器融合具有意义,是感知决策的关键前提。任何传感器在制造、安装...
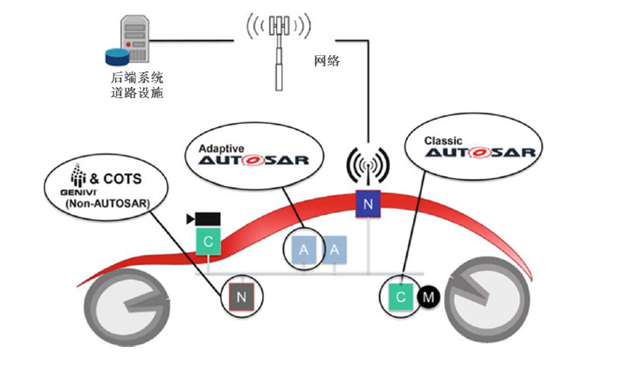
汽车智能化、网联化,甚至自动驾驶大浪已经来临;浪潮带来的是ADAS技术的不断革新、高品质车载娱乐影音的影音推进、以及OTA远程升级、V2X、大数据、云计算等一系列技术的发展;这推进了车载网络容量需求的...
已完成
数据加载中