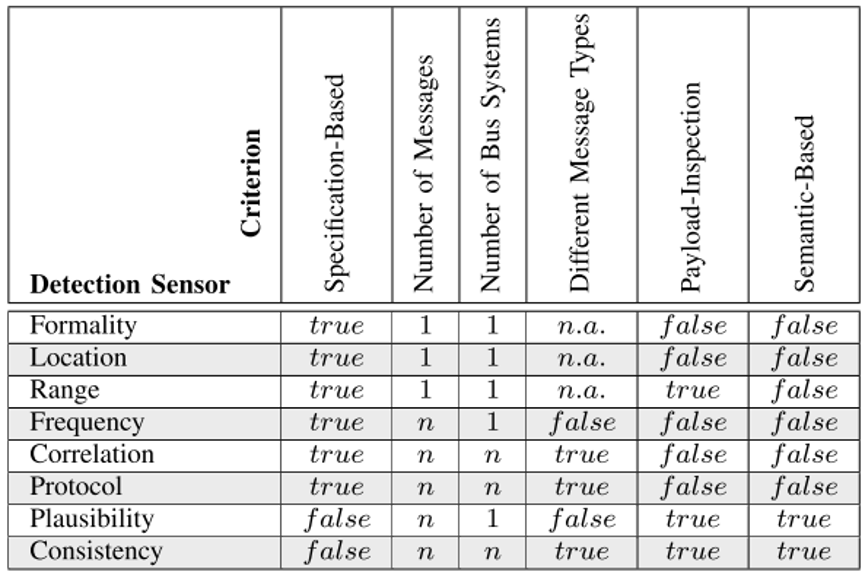
车载网络具有通信系统的非常严格的规范,包括总线系统上允许的每条消息。 对于CAN,这些规范包含在特定网络的CAN矩阵中。 因此,标准AC-1描述了是否只能借助像CAN矩阵这样的规范才能可靠地确定传感器...
随着对物联网(IoT)需求的增长,通过网络提供并控制了诸如电力,天然气,水,铁路,飞机,汽车等各种服务。迫切需要在负责汽车控制的车载网络中升级非法入侵检测技术。已知有许多针对未经授权的入侵攻击的报告方...
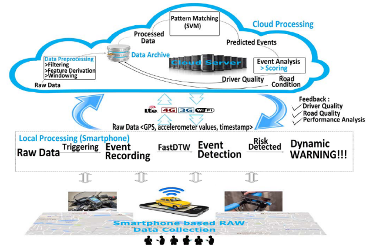
驾驶方式分析和道路异常检测对道路安全产生重大影响。它们直接影响道路事故,并且已经成为解决道路安全问题的重要研究领域。本文提出了一种系统,该系统使用GPS和智能手机的加速度计来对驾驶员的驾驶方式进行分类...
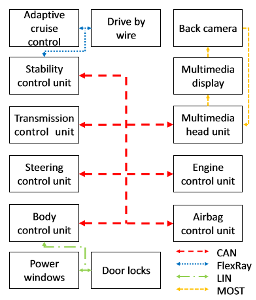
车辆中的控制器局域网(CAN)总线是一种高效的标准总线,支持所有电子控制单元(ECU)之间的通信。 但是,由于缺乏安全功能,CAN总线不足以保护自身。为了有效地检测可疑网络连接,需要入侵检测系统(ID...
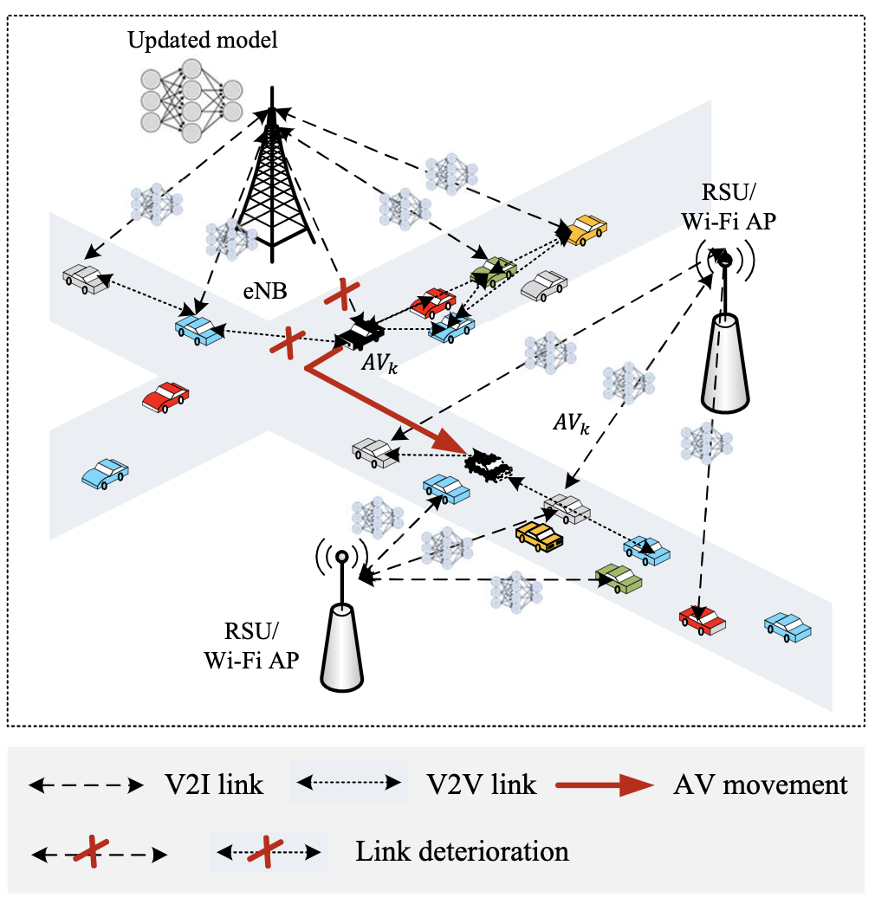
移动边缘计算(MEC)是一种新兴技术,可以将基于云的计算服务转换为基于边缘的服务。 自主车辆网络(AVNET)作为MEC的最有希望的应用之一,可以采用边缘学习和通信技术,从而提高了自主车辆(AV)的安...
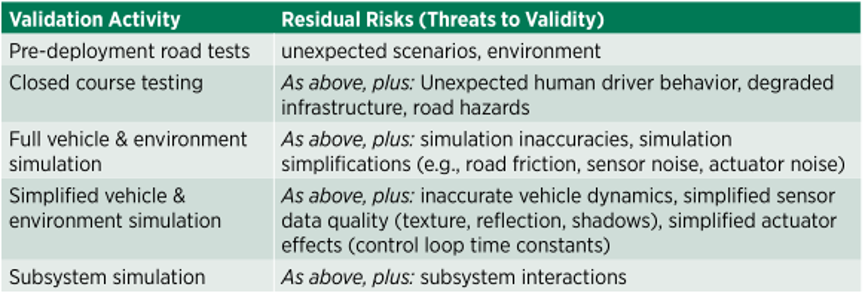
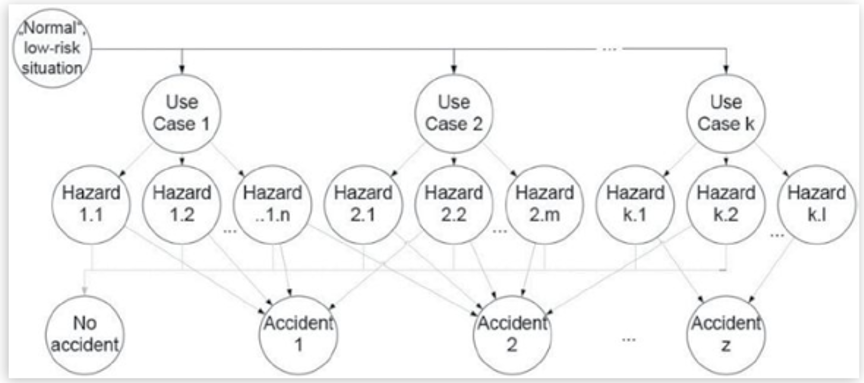
验证高度自动化车辆(HAVs)的安全性是一项重大的自动驾驶挑战。HAV安全验证策略仅仅基于原始的道路测试是不可行的。虽然模拟和使用边缘案例场景可以帮助降低验证成本,但如果不采用验证数据收集和安全分析的...
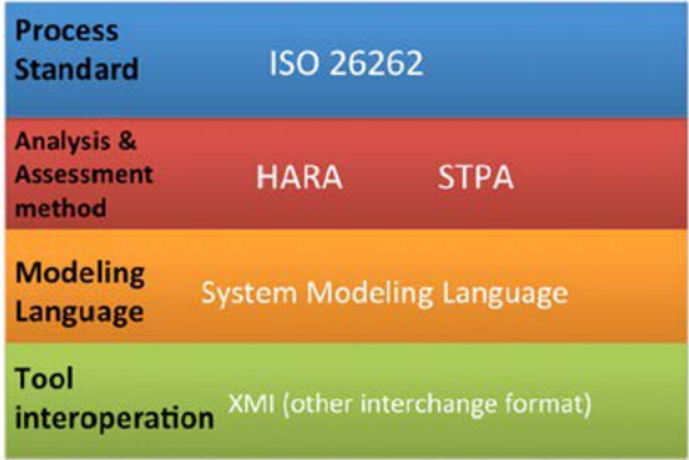
汽车的世界准备好了迎接自动驾驶(AD),而先进的驾驶员辅助系统(ADAS)增加了他们对车辆控制的信心。因此保证AD/ADAS应用程序的系统安全,包括符合ISO 26262的经典功能安全,以及预期功能安...
本文介绍了一个基于系统模型语言(SysML)的完整元模型流程图,以支持将STPA集成到基于ISO 26262的功能安全流程中。特别地,本文阐述了STPA如何通过ISO26262推荐危害分析和风险评估(...
本文描述了一个适用于检测和跟踪行人和自行车的测试算法、具有一个自动驾驶车辆传感器套件的多传感器数据集。该数据集可用于评估融合感知算法的优点,并提供行人、骑自行车者和其他车辆的地面真实轨迹,用于客观评估...
已完成
数据加载中